-
Lex Verkuijl
-
( Supermoderator )
-
OFFLINE
-
Moderator
-

- Beiträge: 4912
- Dank erhalten: 3241
-
-
|
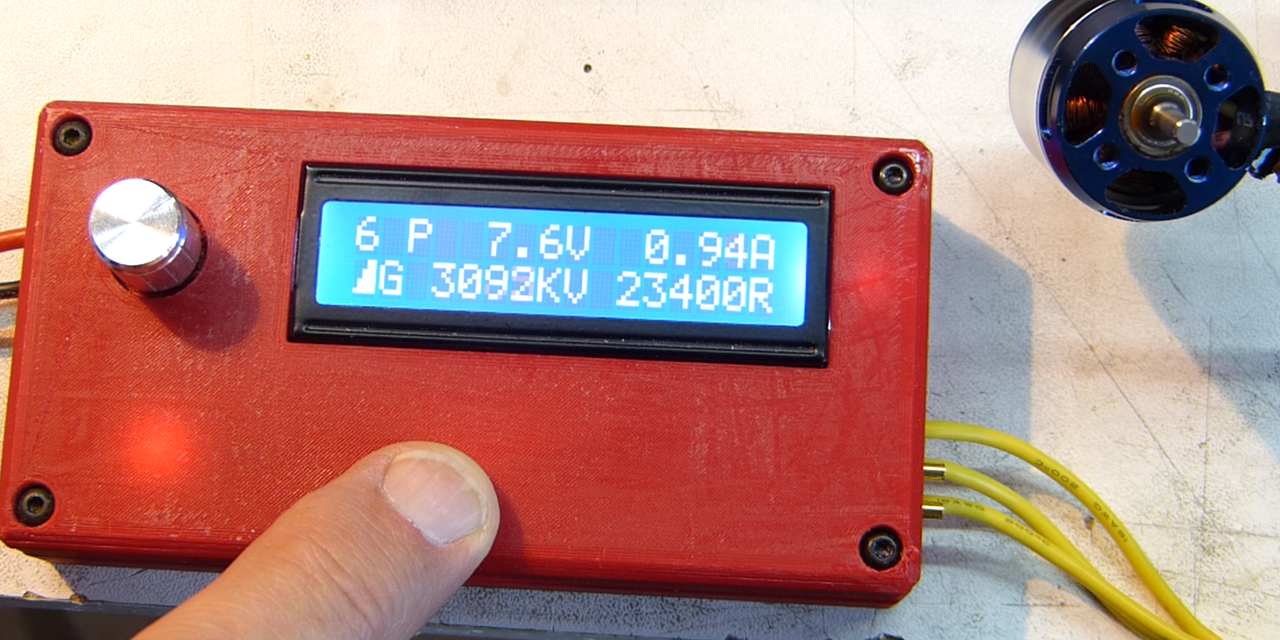
Zuerst, ich habe nicht die Illusion das mein DIY-Gerät genauso gut funktioniert wie ein € 100 oder mehr gekauftes Messgerät. Eine Kalibration met optischen Drehzahlmesser steht auch noch in Planung.
Der angezeigte Werte von Volt zeigen nicht alles. 7,6 V kan 7,60 V sein, aber auch 7,69 V. Intern wirdt aber schon mit den wirklichen Wert gerechnet. Auch de RPM Sensor selber ist nicht 100% Sauber, da 'Rüttelt' es schon manchmal. Wie gesagt, Kalibration volgt.
Auch der AMP-Sensor ist wackelich. Darum ist ein Complementary Filter eingesetzt um den Wert einigermassen stabil anzeigen zu können, damit läugt die Nazeige aber hinter den actuellen wert her. Ist ja auch für die KV erfassung nich benötigd, aber nützlich als Vergleichswert bei Timing- oder andere Justierungen am ESC. Im SkyRc ist ein anderer ESC verbaut als bei mir, da kann auch der Unterschied her kommen. Die Amp-Angabe stimmt mit ein dazu angeklemmter Multimeter in Amp-Wiedergabe..
Für die Interessierten hier der komplette Arduino Code: /* brushless RPM meter
Readout: Volt, Amp, RPM, KV
Setup: instellen aantal polen
instellen interne meting via ESC of extern via draden
Tijdens meting knop drukken is weer naar setup
Knop draaien is gas
*/
#include <LiquidCrystal_I2C.h>
#include <Servo.h>
LiquidCrystal_I2C lcd(0x27,16,2); // set the LCD address to 0x27 for a 16 chars and 2 line display
Servo ESC; // servo object voor ESC
// define custom charaters
byte Gas0[8] = {0x00,0x00,0x00,0x00,0x00,0x00,0x04};
byte Gas1[8] = {0x00,0x00,0x00,0x00,0x00,0x0F,0x1F};
byte Gas2[8] = {0x00,0x00,0x00,0x00,0x0F,0x0F,0x1F};
byte Gas3[8] = {0x00,0x00,0x00,0x07,0x0F,0x0F,0x1F};
byte Gas4[8] = {0x00,0x00,0x07,0x07,0x0F,0x0F,0x1F};
byte Gas5[8] = {0x00,0x03,0x07,0x07,0x0F,0x0F,0x1F};
byte Gas6[8] = {0x03,0x03,0x07,0x07,0x0F,0x0F,0x1F};
String Pole;
String Volt;
String Amp;
String KV;
String RPM;
String KVad;
String RPMad;
const int ESCpin=10; // ESC out signaal
const int PinS1=4; // encoder signaal
const int PinS2=3; // encoder signaal (VAST INTERRUPT)
const int PinRPM=2; // RPM sensor signaal (VAST INTERRUPT)
const int PinSW=5; // drukschakelaar encoder
const int BeepPin=8; // plus beeper
const int RelaisPin1=A0; // relaicoil 1 plus
const int RelaisPin2=A1; // relaiscoil 2 plus
const int AmpPin=A2; // AMP sensor signaal
const int VoltPin=A3; // Volt read pin (midden weestandbrug)
// A4 // I2C pin SDA (VAST)
// A5 // I2C pin SCL (VAST)
int P=6;
double V;
double V_oud;
double A;
double A_oud;
int Kv;
int G;
int RpmLengte;
int KvLengte;
int ESCval=1000;
volatile int Teller;
volatile long Rpm;
volatile long RPMcount;
bool RPMinput;
bool Relais1;
bool Relais2;
unsigned long LaatsteDraai=0;
void setup() {
lcd.init(); // initialize the lcd
lcd.backlight(); // backlight aan
Serial.begin(115200);
pinMode(PinS2, INPUT);
attachInterrupt(digitalPinToInterrupt(PinS2), EncoderDraai, LOW);
pinMode(PinRPM, INPUT);
attachInterrupt(digitalPinToInterrupt(PinRPM), InterruptFired, CHANGE);
lcd.createChar(0, Gas0); // charakters gas instellen
lcd.createChar(1, Gas1);
lcd.createChar(2, Gas2);
lcd.createChar(3, Gas3);
lcd.createChar(4, Gas4);
lcd.createChar(5, Gas5);
lcd.createChar(6, Gas6);
pinMode(PinS1, INPUT);
pinMode(PinSW, INPUT_PULLUP);
pinMode(BeepPin, OUTPUT);
pinMode(RelaisPin1, OUTPUT);
pinMode(RelaisPin2, OUTPUT);
pinMode(AmpPin, INPUT);
pinMode(VoltPin, INPUT);
ESC.writeMicroseconds(ESCval);
ESC.attach(ESCpin);
V_oud=analogRead(VoltPin); // init oud voltage
Beep(); // aan signaal
manual_input_setup(); // manual setup draaien
}
void loop() {
// -------- drukken switch -----------
if (!digitalRead(PinSW)) { // als gedrukt
Beep(); // signaal
ESC.writeMicroseconds(1000); // ESC uit
while (!digitalRead(PinSW)) { // wachten op loslaten
delay(10);
}
manual_input_setup(); // manual setup draaien
}
// Volt
V=analogRead(VoltPin); // volt lezen
V=(V*0.3)+(V_oud*0.7); // comp filter
V_oud=V; // reset oud
V=map(V, 0, 666, 0, 11200); // map naar voltage
V/=1000; // werkelijke voltage
if(V<0) V=0.0; // min uitsluiten
Volt=String(V,1); // Volt waarde naar string
if(Volt.length()<4) { // als string te kort
Volt=" "+Volt; // spatie toevoegen
lcd.setCursor(4,0); // cursor plaatsen
lcd.print(" "); // oud char met spatie overschrijven
}
lcd.setCursor(4,0); // cursor plaatsen
lcd.print(Volt); // string printen
// Amp
A=((analogRead(AmpPin)-526.0)/100.0); // lees ampere
if(A<0) A=0,0; // min uitsluiten
if(G==0) { // bij gas nul, versneld naar nul
A=0; // amp nul
A_oud=0; // amp oud nul
}
A=(A*0.1)+(A_oud*0.9); // comp filter
A_oud=A; // reset oud
A*=2.84; // omzetten meetwaarde naar amp
Amp=String(A,2); // Amp waarde naar string
lcd.setCursor(11,0); // cursor plaatsen
lcd.print(Amp); // string printen
// RPM
ReadRpm(); // lees rpm
RPM=String(Rpm); // naar string
RpmLengte=RPM.length();// lengte string
RPMad=""; // opvul bepalen
if(RpmLengte==1) {RPMad=" ";// opvul 4 spaties
} else
if(RpmLengte==2) {RPMad=" "; // opvul 3 spaties
} else
if(RpmLengte==3) {RPMad=" "; // opvul 2 spaties
} else
if(RpmLengte==4) {RPMad=" "; // opvul 1 spatie
}
RPM=RPMad+RPM; // string samenstellen
lcd.setCursor(10,1); // cursor plaatsen
lcd.print(" "); // wissen
lcd.setCursor(10,1); // cursor plaatsen
lcd.print(RPM); // string printen
// KV
Kv=Rpm/V; // kv berekenen
KV=String(Kv); // naar string
KvLengte=KV.length(); // lengte string
if(KvLengte==1) {KVad=" ";// opvul 3 spaties
} else
if(KvLengte==2) {KVad=" "; // opvul 2 spaties
} else
if(KvLengte==3) {KVad=" "; // opvul 1 spaties
} else KVad=""; // opvul 0 spaties
KV=KVad+KV; // string samenstellen
lcd.setCursor(3,1); // cursor plaatsen
lcd.print(" ");
lcd.setCursor(3,1); // cursor plaatsen
lcd.print(KV); // string printen
// Gas
G=G+Teller; // gas bepalen
Teller=0; // teller reset
G=constrain(G, 0, 7); // gas begrenzen
lcd.setCursor(0,1); // cursor plaatsen
if(G==0) lcd.write(0); // bepalen teken graph bar
if(G==1) lcd.print("_");
if(G==2) lcd.write(1);
if(G==3) lcd.write(2);
if(G==4) lcd.write(3);
if(G==5) lcd.write(4);
if(G==6) lcd.write(5);
if(G==7) lcd.write(6);
ESCval=1000+(G*145); // puls esc bepalen
ESC.writeMicroseconds(ESCval); // puls schrijven
delay(100); // delay voor rustigere uitlees
} // >>>>>>>>>>>>>>> END LOOP <<<<<<<<<<<<<<<<<<
// >>>>>>>>>>>>>> RUBROUTINES <<<<<<<<<<<<<<<<
void EncoderDraai(){ // bij bewegen encoder
if (millis()-LaatsteDraai>5){ // als minimaal 5ms verstreken
Beep(); // beep
if (digitalRead(PinS1)){ // als draairichting CW
Teller--; // teller bijwerken
} else // als draairichting CCW
{
Teller++; // teller bijwerken
}
LaatsteDraai=millis(); // tijd reset
}
}
void manual_input_setup() {
// initialiseren
lcd.clear();
lcd.setCursor(8,0);
lcd.print("P");
lcd.setCursor(2,1);
lcd.print("Pole nr setup");
// instellen aantal polen
while(digitalRead(PinSW)) { // terwijl knop niet gedrukt instellen waarde
P=P+Teller*2; // pool waarde veranderen
Teller=0; // teller reset
P=constrain(P, 2, 30); // polen begrenzen
Pole=String(P); // Pole waarde naar string
if(Pole.length()<2) { // als string te kort
Pole=" "+Pole; // spatie toevoegen
lcd.setCursor(5,0); // cursor plaatsen
lcd.print(" "); // oud char met spatie overschrijven
}
lcd.setCursor(5,0); // cursor plaatsen
lcd.print(Pole); // string printen
}
Beep();
while(digitalRead(PinSW)==LOW) {} // wacht knop loslaten
// initialiseren
lcd.clear();
lcd.setCursor(0,0);
// ingestelde waarde weergeven
if(RPMinput){ // extern geschakeld
lcd.print(" EXTERN CONNECT ");
} else { // bij intern geschakeld
lcd.print(" INTERN ESC ");
}
lcd.setCursor(3,1);
lcd.print("Input setup");
while(digitalRead(PinSW)) { // terwijl kop niet gedrukt
if(Teller!=0) { // bij draaien
Teller=0; // reset teller
RPMinput=!RPMinput; // wissel input
lcd.setCursor(0,0);
if(RPMinput){ // betreffende input weergeven
lcd.print(" EXTERN CONNECT ");
digitalWrite(RelaisPin1, HIGH);
delay(5);
digitalWrite(RelaisPin1, LOW);
} else {
lcd.print(" INTERN ESC ");
digitalWrite(RelaisPin2, HIGH);
delay(5);
digitalWrite(RelaisPin2, LOW);
}
}
}
Beep();
while(digitalRead(PinSW)==LOW) {} // wacht knop loslaten
// initialiseer vast display
lcd.setCursor(0,0);
lcd.print(" P V A");
lcd.setCursor(0,1);
lcd.write(0);
lcd.print("G KV R");
lcd.setCursor(0,0); // cursor plaatsen
Pole=String(P);
lcd.print(Pole); // string printen
G=0; // reset gas op nul
// terug naar loop
}
void Beep() { // beep laten klinken
digitalWrite(BeepPin, HIGH);
delay(5);
digitalWrite(BeepPin, LOW);
}
void InterruptFired() // interrupt voor rpm read, teller verhogen
{ RPMcount++; }
void ReadRpm() { // rpm read, bereken
noInterrupts(); // interrupts uit
RPMcount=0; // set variable in critical section
interrupts(); // interrupts aan
delay(200); // wachttijd waarbij stabiel RPM gemeten kan worden
noInterrupts(); // interrupts weer uit, meetwaarde constant
Rpm=RPMcount*60/P*5; // bereken RPM (Hz x 60 x 2) / number of poles = no-load RPM
interrupts(); // interrupt aan
}
|
 Das Forum
Das Forum